Harp project summary
By Scot Gresham-Lancaster
Preface:
This document summarizes the current state of a decades long line of research regarding the invention of a new type of music controller. This controller has gone through several versions and prototypes but all the investigations share the common thread: investigating a three dimensional relationship between solid struts and strings under tension.
What follows is a transcription from a web page that outlined some of the history of this project up until 2001,
http://www.o-art.org/Scot/Tensegrity.html
The Tensegrity Harp Project
Scot Gresham-Lancaster ongoing research ( since 1983 ) into the
harmonic relationships suggested by the geodesic, synergetic, and tensegrity
math of R. Buckminster Fuller.To See the lastest update click here
Early in 1983 I was commissioned to write the music for a wedding
reception of performance artist and art curator Evan Painter. At that time I
was steeped in reading Synergetics by Buckminster Fuller and decided to work
with these mathematics as a compositional determinate. I was particularly
interested at that time, in the vocabulary of the geodesic dome that described
the rational relationship of the length of strut members in a geodesic object
as "Chord" factors. This obvious allusion to harmonic relationships
prompted me to create a piece that mapped these specific frequency
relationships determined by the lengths of an architectural structure to a
harmonic lattice. These harmonic lattices are common among researchers in to
intonation theory and so I based the research on combining my knowledge of
geodesic math with the concepts of harmonic lattices put forward in modern
intonation theory. My first project involved using the lattice created using
the chord factors from a 6 frequency geodesic ellipsoid with foci proportioned
at the golden mean. If the great ellipse of the defined structure was 2 units
across, the distance between the foci would be 1.61803989... units ( the golden
mean ). The lattice of chord factors that construct such a geodesic ellipsoid
will generate. The main attribute of the lattice is that it is described by a
triangular juxtaposition of members as opposed to the quadrille or
quadrilateral displacement of Cartesian based mathematics.
By multiplying each of the chord factors of the representative
architectural strut members by the fundamental frequency of the intended scale
the frequency relationship of each chordal member is established. These chord
derived frequency sets are ordered in matrices based on each struts placement
in the original structure. By collecting the parameters of adjacent matrix
members to the in ordered grouping, isorhythmic chord groupings and polyphonic
melodies determined by these relationships are generated. This complex set of
predetermined systems generated a sweet and pleasing sound field that had
inherent symmetries of motion and confluence and yet was complex enough to
afford continuous gentle variation.
The sequential playing of groupings in the matrices could actually
be visualized as planes that were passing through the ellipsoid. Sticking
strictly to these intersections as a means of timing lead to thinking of the
vertices of the structure as being "strings" of a conceptual harp
that was being played by the planes as they passed through each vertices.
truncated octahedron tensegrity This concept of the vertices being strings, led
to the next phase of the research. This type of structures based on the work of
Kenneth Snelson lent itself to being the basis for a playable instrument
appeared to be the tensegrity structures. The question was how was this new
proposed instrument to sound: acoustically or in more challenging way as a
means of playing the multiple parameters needed for the control of digital
synthesis algorithms. By transducing the net stress of each of the faces of a
tensegrity structure ( such as the truncated octahedron in the illu. ) then one
could intuitively control multiple parameters associated with processes such as
vocoding, re-synthesis, etc. Also, if one could distinguish between the act of
stretching and the act of plucking, more useful musical information would be
generated by the instrument. This intuitively interesting project is fraught
with technical difficulties, however.
 The problems associated with
the work are both of a hardware and software nature. Additionally, there are
considerations that add to the look of the instrument as an aesthetically
beautiful object. A transducer was needed that would translate the information
regarding the stretching and plucking of the suspension members without
interrupting the look of the instrument. My association with STEIM and its
cadre of instrument designers lead me to many potential solutions. First Bert
Bongers suggested a transducer that was linked to a spring that was in a
machined part that held a magnet and a hall effect sensor. This is a problematic
solution mostly because of the non-linearity of the hall effect sensor. In
thinking about the problem more carefully, I came across al line of inquiry
that seemed very interesting.
The problems associated with
the work are both of a hardware and software nature. Additionally, there are
considerations that add to the look of the instrument as an aesthetically
beautiful object. A transducer was needed that would translate the information
regarding the stretching and plucking of the suspension members without
interrupting the look of the instrument. My association with STEIM and its
cadre of instrument designers lead me to many potential solutions. First Bert
Bongers suggested a transducer that was linked to a spring that was in a
machined part that held a magnet and a hall effect sensor. This is a problematic
solution mostly because of the non-linearity of the hall effect sensor. In
thinking about the problem more carefully, I came across al line of inquiry
that seemed very interesting.
In electronics magazines I spotted a company called Instrument Specialties
Inc.. which specialized in making special purpose gaskets for electromagnetic
isolation of components in microwave electronics. One of their products was
called "Conductive Silicon Elastomers". The short description
included the information that the material could be doped with carbon, copper,
aluminum, nickel, etc. It occurred to me if this string like material was
stretched that there was a chance that the metal particles suspended in the
silicon would contact more their changing any resistance that was created. Upon
talking to the field representatives this was indeed the case. I then went over
the specification sheets and selected the carbon/nickel combination as having
the best conductivity with at least some resistivity. After some phone work I
was able to acquire a six foot sample of a fabricated 130 mm length of this
material. It met and exceeded my expectations. At rest it has almost no
resistivity with about 100 ohms at 12 cm. when stretched this resistance
increases linearly with stretch to about 4 M ohms. This was quite good for my
purposes.
By using this material with a voltage across the members of a
tensegrity structure can be connected to an A/D converter and the stretch can
be congruently converted into a digital number based on the resolution and
sampling rate of that conversion. With the backing of the Multimedia masters
degree program at CSUHayward and the support of Microchip Inc. I have acquired
a PicMaster emulator and a Picstart plus programmer. For my initial
experimentation, I am using the PIC 16C77 embedded processor which has
integrated into it eight 8 bit A/D channels. With this system I can read the
stretching of the structure and in that way create a dynamic vector model that
can be remapped to abstract parameters associated with one or many DSP
algorithms that are generating, delaying, filtering or in some other way
modyifying sonic material.
The most, initially, unclear aspect of the reason for this
construction can be summed up in a historical perspective of my experiences
with various types of alternative controllers.
Postscript July 11, 2001: Last night while watching the PBS series
"Building Big" there was an interview with sculptor and designer
Kenneth Snelson in which it was revealed that R Buckminister Fuller should not
be attributed with the actual conceptualization of the tensegrity structure,
but rather blatantly took credit for work that Mr. Snelson had done. This sort
of robbing of attribution is something that has plagued my own work as a
technical assistant and digital music problem solver for many years and so I
was very embarrassed when in my excitement at discovering this fact I wrote to
Mr. Snelson without taking the time to edit this page to reflect this truth.
Those who are interested are invited to read a full account of a corrected
history in the form of a letter to R. Motro of the International Journal of
Space Structures by Mr. Snelson that sets the record straight.
Update from February 2002
I have decided to take another approach on the construction of
this instrument and not use the Conductive Silicon Elastomers. While they
produced promising results they were not stable and required constant
recalibration. I spent more time on the recalibration routines than working on
the routines to make the construction a viable musical instrument. So there are
now two prototypes using two different approaches.
One is based on the Tensegritoy model.
(http://www.neurotoys.com/tensg.html )
 By building this model I was given an
elastic version of the structure I intended to work with then I simply attached
linear potentiometers to the members and took the output of those
potentiometers directly into a voltage to midi conversion box (the STEIM
sensorlab ) and input the midi conversion into a Macintosh computer running Max
software. I use Max to message the data for the particular application that I
am working on.
By building this model I was given an
elastic version of the structure I intended to work with then I simply attached
linear potentiometers to the members and took the output of those
potentiometers directly into a voltage to midi conversion box (the STEIM
sensorlab ) and input the midi conversion into a Macintosh computer running Max
software. I use Max to message the data for the particular application that I
am working on.
The second model is more elaborate. I built struts out of oak and
mounted guitar tuning machines on one end and added a bridge on the other. Then
i constructed a real stringed harp using the tension created by the tuning pegs
to tighten and tune up the construction. This phase is now finished and I have
what i would describe as a multi dimensional Berimbau. The next phase of the
building of this instrument is to add six single coil pickups to the bridge of
each of the struts and then not only amplify the unique string vibration and
sounds that they produce, but also do a real time spectrum analysis and general
acoustical analysis of each of the pickups and use that as a performance
determinate. I am currently working on the best pickups and mountings for those
pickups on the instrument.
Unfortunately there are no photos of these 2 prototypes. A student was using the model that was just described during a demonstration in a class of mine at CSUH in Nov. of 2001 and he handled it too roughly and broke a string. Since the entire structure is held together by integrated “tensegrity”, the whole instrument fell apart. This pointed out a here to fore unrealized and very major flaw with this design approach; if a string breaks the entire instrument simply disintegrates into a heap of wires and sticks. This required rethinking the entire approach to the instrument. One of the other reoccurring problems was that if none of the struts touched then each of the tensions nodes would need to wirelessly transmit the information form each end of the strut. This was also a major technical issue since then the instrument would need at least 12 independent wireless channels or some form of 12 channel multiplexing that would take the current/resistance reading at each vertex with an A/D converter, encode that information and wirelessly transmit it to the central processing unit. This would require a significant modification to the existing STEIM sensor lab that was being used since it had no wireless capabilities other than ultrasound up to that point. We did spend one afternoon trying to multiplex ultra sonic bursts from a mockup of the vectors, but it was to fraught with errors from echoes and other acoustic interference.
Third Prototype the Octahedral Harp
At this point the experience of the use of tensegrity and the problems that it produced lead to the next design idea. Unnamed for many months as we worked on prototypes it came to be called the Octahedral harp. 6 vertex and 12 edges for 12 separate resonating strings.
 Here is a picture of me holding the
second prototype at STEIM in the Netherlands in 2002 taken by may collaborator
on that project instrument builder and master electronic music instrument
builder Jorgen Brinkman.
Here is a picture of me holding the
second prototype at STEIM in the Netherlands in 2002 taken by may collaborator
on that project instrument builder and master electronic music instrument
builder Jorgen Brinkman.
It was made of oak struts with guitar tuners on each vertex. The center is a custom built brass armature that tightens into brass sleeves with a locking screws. In this pass on the technology we hacked a Logitech Rumblepad ® to act as a wireless data acquisitions source. The new library of HID libraries implemented by STEIM as a package called Junxion that takes the USB signal from any interface device and remaps it to any number of the many midi controller parameters.
In the summer of 2002 we developed the first working prototype of this instrument.

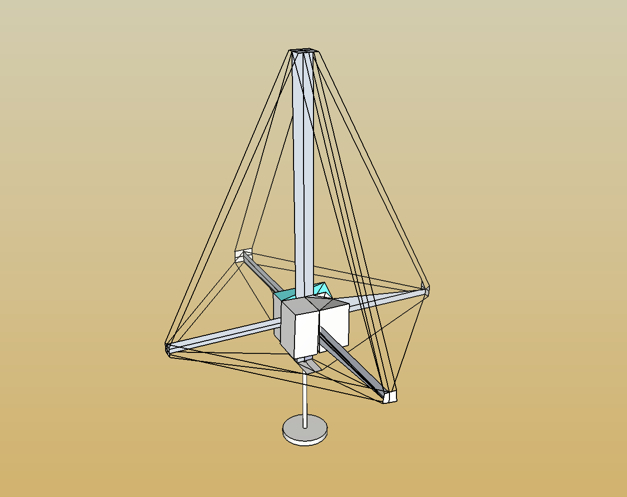
This sketch shows many of the various attributes of the actual physical design. It includes a sketch of the laser harp assembly and the location of the modified Logitech unit, the FM transmitter and the Force Sensing resistors. The laser harp assembly is diffraction of a single laser through a series of 6 glass slices all equidistant from each other at a 45-degree angle. This sends 6 equidistant beams at each photo resistor along the vertical strut online.
The handle is form fit with divits. Within these impressions, force sensing resistors are mounted. In this way the performer has independent control of parameters via each finger tip. There are two thumb switches and a thumb pad that is also an FSR.
It was discovered that the resonance the strings conducted through each of the struts. By mounting piezo elements on either side of the main horizontal strut. The stereo FM transmitter in the sketch is one of those units produced to connect an iPod or CD Walkman to an FM radio in a car stereo. So the range is limited to about 12 feet or so.

This picture illustrates the interconnections available to the wireless joystick control. There are two joysticks and two sliders for a total of 10 independent 0-5V inputs. Also, with the D-control pad and the various other switches there is a total of 4x4 grid or 16 on of switches.

There are three separate strings that cross four bridges on each of the three axis, XYZ. This makes 12 isolated courses for a single string based instrument. Each of these three courses of strings on each axis are electrically isolated. By pulsing each string with a heterodyning pulse burst, they each become alike a Theremin. The picture to the left, on the top is a signal without the heterodyning of a buddy near the string and so 3 of the switch inputs can read the pulses and give information that is analogous to the proximity.
The initial idea was to use this controller solely as a live multi-parameter electro-acoustic control device, but at this evolution of the instrument the piezo provided an interesting acoustic element that had not been anticipated. If it was to be developed that way one would need to get independent electrical coil pickups on each of the 12 courses to get the individual frequency for each independent string fragment.
At this point in the experimentation it became clear the intonation of each of these strings needed to be more carefully considered. The first assumption was that by making the proportions of the struts whole number ratios with each other the intonation would fall in place. Of course, this was not well thought out since the strings define the hypotenuse of a triangle. So the frequency was congruent with the square root of the addition of to just lengths, which was some irrational proportion that was very nearly impossibly out of tune. So with the help of shaman performance artist Sam Ashley, we developed a Max patch to try and discover a tuning proportion

This method relied entirely on a heuristic approach and while interesting as a stand alone interest, proved useless for the over all arc of this project.
4th Prototype
2004
Eleven years into the project and it was substantially a completely different endeavor. The concept of a direct link to the ideas of Snelson and Fuller had given way to an entirely new conception that was really more about the functionality of the proposed instrument. Two major developments occurred in the fall of 2004 that made an impact of the design of the 4th prototype. While working at CNMAT on a video project for composer Edmund Campion, I began having a series of extended conversations with Adrian Freed the amazing Technical Director there. He was working quite closely with composer Roberto Gonzalez on a new electro acoustic harp which was modeled on the diatonic harps of Latin America. Much like the diatonic CelticHarps of Ireland these Peruvian and Mexican harps had the traditional design that one sees with a harp, but Adrian had discovered if he put some piezo film under the straddle of each srting he could directly read the fundamental frequency and amplitude of a plucked string. This was an amazing bit of technological information for my work since I had a total of 24 bridges to work from. The comparison of the phase and frequency of the piezo on each end of a given string length could be analyzed to also give the position where the string was plucked. I incorporated those electronics into the next phase of the design.
So to recap the features:
- Twelve independent strings
- Kynar piezo pickups on each bridge
i. Transduces string vibration to voltage
ii. Time comparison algorithm to locate position of pluck or bow
- Motorola MC33794 chip generates a 3-D electrical field and detects the size and shape of objects within the field and is attached to each of the independent 3 strings.
- Low wattage laser diffracted through 6 glass sides at a 45 degree angle point at photoreceptors that vary in voltage based on light blockage
-
This design was presented to the CREATE studio at UCSB in 2003. Here is the talk announcement from that event:
OCTOBER 17, 2003, AT 4 PM.
HUMAN CONSIDERATIONS FOR MAKING MUSIC WITH MACHINES
Location
Music Dept., Room 2215 (Studio Xenakis)
The
lecturer will present his current work in developing a multi dimensional
controller specifically designed for the live execution of electro acoustic
music. The "Tensegrity Harp" integrates 42 channels of control and 4 acoustic
information channels with the specific intent that this information be used to
shepherd digital sound production and sound processing algorithms.
Is breath any longer necessary? : Human considerations for making
music with machines.
The rhetorical question in the title points up the danger imposed
by the integration of technology in the act of making music. As the act of
making music becomes more and more integrated with automated processes and
discorporate transducers and interfaces, will music change in the face of no
longer being integrated with the performer/composers body in any tangible way?
The lecturer will present his current work in developing a multi
dimensional controller specifically designed for the live execution of electro
acoustic music. The "Tensegrity Harp" integrates 42 channels of
control and 4 acoustic information channels with the specific intent that this
information be used to shepherd digital sound production and sound processing
algorithms.
Also, he will discuss the social ramifications of using broadband
networks, such as Internet2, for creating new social music making contexts that
integrate visual and sonic immersive techniques to collapse two or more
geographically separated performance space into one shared performance space.
Finally, he will discuss the relationship of ubiquitous computing
and the phenomenon of smart/flash mobbing to the future of performance
practice, and the long term ramifications of the integration of technology into
future performance practices.
http://www.create.ucsb.edu/create/createWeb/news/newsShow.php?id=30
Working with my friend Jon Steele in Oakland we made another protoype that used Brazilian hard wood and Upright bass strings. That instrument was much like the one designed at STEIM with one major difference : the vertex or bridges were done at the end of the struts and not with pass through holes like in the previous model. This precluded the need for the slightly heavy brass center piece. However, intonation was still a problem. Here is a picture of that instrument:
Insert picture here:
The main discovery with this instrument was that it was very difficult to isolate the resonance of a separate string length and therefore the idea of cueing the location of the string excitation from the time difference between the two bridges was often confused. Particularly when the harp was played polyphonically. For more information on this technique refer to:
http://citeseer.ist.psu.edu/paradiso02passive.html
After building this fourth harp it became clear that there was a need to completely solve the intonation problem associated with the proportions of the struts. It finally and rather obviously became clear that the problem needed to be addressed from another perspective. Rather than solving for the adjacent and opposite of the various right triangles defined by this structure, what was needed was to set the hypotenuses to the various desired whole number ratio lengths and then calculate the lengths of the three struts from there.
Unfortunately, this proved to be a much more involved problem that first anticipated. To prove that it was near possible a model was created that had 12 independent pieces of 1/4 inch dowel with Velcro on each end. These dowels were cut to this proportion.
len["AF"] = 6.0 / 5.0;
len["FB"] = 15.0 / 8.0;
len["BE"] = 9.0 / 5.0;
len["EA"] = 1.0;
len["CF"] = 4.0 / 3.0;
len["FD"] = 8.0 / 5.0;
len["DE"] = 3.0 / 2.0;
len["EC"] = 5.0 / 4.0;
len["AC"] = 9.0/ 8.0;
len["CB"] = 5.0 / 3.0;
len["BD"] = 2.0/ 1.0;
len["DA"] = 16.0/ 15.0;
Using this rather crude method, it was determined that there was a good chance that a set of strut lengths could be found that would create a set of 12 edges on an irregular octahedron that would have this particular set of ratios on each edge. Finding thus specific strut lengths was made difficult by only having one side and an angle given.
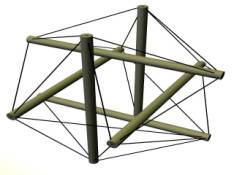
Here is a rendering of the approximate relationships of each of these edges.

The next pass on this was to figure a method to make this determination. I turned to my friend and long time collaborator Dr. William Thibault of the CSUEastBay Math and Computer Science Department. He had recently been working with Genetic algorithms to solve the problems associated with automatically aligning multiple projectors for seamless surround projection. If interested go to: http://obscuradigital.com for more information. He surmised that he could use these same genetic algorithms to determine a best fit for creating accurate strut lengths for such a just intoned theoretical object. Here is the latest code that he developed in collaboration with the author to try and solve this problem. It requires a library called the Real Genome from MIT to properly compile.
Click on this link to see the code that was developed by Bill Thibault for this Purpose
Alarmingly, this code returned no actual solution. Of interest to any math students reading this is that there may be no solution to this seemingly very straightforward problem
Genetic algorithm solution for AB CD EF
| X | Y | Z | ||||
| Origin | 0 | 0 | 0 | |||
| A | -0.3273 | 5.35152 | 1.30954 | |||
| B | 1.68074 | -9.1841 | 1.3938 | |||
| C | -6.45179 | 0.90998 | -7.89049 | |||
| D | 1.83111 | -0.929835 | 9.0854 | |||
| E | -3.54813 | 1.43955 | -1.08322 | |||
| F | 9.70693 | -5.55459 | 1.02791 | |||
| String Length | Meters | Feet decimal | feet | inches | fraction | |
| ACBD = | 5.858 | 19.21916013 | 19 | 2 | 5/8 | |
| AFBE = | 5.875 | 19.27493441 | 19 | 3 | 5/16 | |
| CEDF = | 5.683 | 18.64501315 | 18 | 7 | 3/4 | |
| Strut Length | ||||||
| AO = | 0.53272 | 1.747769032 | 1 | 9 | 0 | 8.973228346 |
| BO = | 1.68074 | 5.514238854 | 5 | 6 | 3/16 | 0.170866142 |
| AB = | 2.21346 | 7.262007885 | 7 | 3 | 1/8 | 3.144094488 |
| CO = | 0.90998 | 2.985498692 | 2 | 11 | 13/16 | 11.82598425 |
| DO = | 0.929835 | 3.050639768 | 3 | 0 | 5/8 | 0.607677165 |
| CD = | 1.839815 | 6.036138461 | 6 | 0 | 7/16 | 0.433661417 |
| EO = | 1.08322 | 3.553871396 | 3 | 6 | 5/8 | 6.646456693 |
| FO = | 1.02791 | 3.372408142 | 3 | 4 | 1/2 | 4.468897638 |
| EF = | 2.11113 | 6.926279538 | 6 | 11 | 1/8 | 11.11535433 |
These solutions were within 1 mm or so, but the error is about 3 to cycles. In reality, however, with adjustable bridges and other adjustments, this is a very workable set of measures. It is of intellectual interest that there is not a “perfect” solution to this three dimensional problem, however.
Once a solution was in place a new extension came to mind.
Next Phase: the 72 course Octahedral Harp
The idea arose to extend the number of strings on each axis
from 1 to 6, using guitar hardware at each of the vertexes Here is a sketch 
There would be a total of 72 independent string lengths with a total of 18 strings; 6 strings on each axis. The concept would be for there to have each set of strings to be set to just pentatonic scale. Below is a table of the resultant frequencies of mapping the 12 edge frequencies to the most common just pentatonic frequency set. These combinations of ratios result in some repeated ratio combinations -
1000= 1/1 9/8 - 5/4 - 3/2
-
5/3 – 2/1
1/1 1000.000-1125.000-1250.000-1500.000-1666.667-2000.000
15/16 1066.667-1200.000-1333.333-1600.000-1777.778-2133.333
9/8 -1125.000-1265.625-1406.250-1687.500-1875.000-2250.000
6/5 -1200.000-1350.000-1500.000-1800.000-2000.000-2400.000
5/4 -1250.000-1406.250-1562.500-1875.000-2083.333-2500.000
4/3 -1333.333-1500.000-1666.667-2000.000-2222.222-2666.667
3/2 -1500.000-1687.500-1875.000-2250.000-2500.000-3000.000
8/5 -1600.000-1800.000-2000.000-2400.000-2666.667-3200.000
5/3 -1666.667-1875.000-2083.333-2500.000-2777.778-3333.333
9/5 -1800.000-2025.000-2250.000-2700.000-3000.000-3600.000
15/8 -1875.000-2109.375-2343.750-2812.500-3125.000-3750.000-
2/1 -2000.000-2250.000-2500.000-3000.000-3333.333-4000.000-
Color Key
Single Frequency No highlight = 23 solo
Pair of Frequencies Yellow Highlight =
9 pairs
Three Frequencies Green Highlight =
3 trios
Four Frequencies Blue Highlight = 4 quads
Five Frequencies Grey Highlight =
1 set of 5
This
then indicates that there would not be 72 distinct frequencies on the harp but
rather a total of 40 distinct frequencies present. This is significant because
if the instrument was used solely to trigger electro acoustic events that would
mean that would mean that 40 not
72 separate events could be detected by frequency alone. Of course using the
acoustic distance detection algorithm in conjunction with the frequency mapping
on the three dimensional object could possibly give a 3d mapping of the
performers gestures on the instrument.
As
with much of the process of creating the early prototypes, each new phase
creates a new set of potential new means of expression for to investigate.
Since
the genetic algorithm was unable to map the end points exactly to the whole
number ratio set that we were initially inputting a new strategy to be able to
adjust these frequencies is needed. The previous illustration shows the strings
being bridged at a square roughly near each vertex. The idea in that case is to
take advantage of electric guitar hardware at the bridge points. A standard
adjustable bridge would easy in fabrication and give the advantage of being
able to make fine adjustments to compensate for the 1- 2 % error that the
genetic algorithm generated. Another approach is to crat a more “harp-like”
configuration using concentric octahedral string distributions with each
congruent configuration being scaled by the degree of the just pentatonic or
even larger (diatonic, 2 octave pentatonic or diatonic etc.) scale. This sketch
may give the reader an idea about such a configuration.

While
only two of the twelve edges are represented in this sketch the orientation in
this “congruent” configuration is somewhat more like a standard harp configuration.
The main disadvantage is that each of the vertex would require special
fabrication for the adjustable bridges needed to bring each of the edge lengths
fully into tune.
Conclusion … ?
At
this point, the next phase of the project is waiting on sufficient funds to
make the 5th and possibly sixth prototype that can be used to
examine the issues regarding the construction of the full realization of this
generation of this ongoing project. Perhaps the most interesting outcome of
this ongoing research has been the evolution that each of the various stages of
research have been forced on the development not by conjecture but by the
reality of trying to make the physical models of these rather abstract
concepts. The act of realization is enlightening as the actual physical model
and the procedures needed to create this model create special requirements that
can not be predicted and have always lead to new conclusions and lines of
inquiry.
In
a perfect world research like this could be evenly and consistently be followed
to logic conclusions in controlled and well-funded circumstance. However, these
prototypes have each been surprisingly expensive. The last full realization of
the octahedral harp was well over $300 in parts cost alone. Using Brazilian hardwood
for the lengths ($75), new bass strings ($120), and professional quality tuners
for the three string courses ($72). One can see by expanding this to 72 courses
or 18 strings at anywhere near these costs that the raw materials alone are
near $1000. This fact alone has stopped the progress of fully realizing this
next generation of prototyping. However, work has started on and experimental
prototype with aluminum angle and piano wire more as a feasibility study and to
investigate the actual intonation of the harp as predicted by the genetic
algorithms.
This
has been an exciting if very slow moving process, but soon a new instrument
will emerge that shares an ancient lineage and portends the best use of new
technologies in an attempt to create a focused instrument that is designed
specifically for the promise of purely digitally generated sound material.
Here is a shot of a sketchup rendering of my current thinking on the design.